
プロジェクトのスケジュール計画で最もよく使われるツールは、「プロジェクト(またはプログラム)評価およびレビュー手法」(PERT)と「クリティカルパス法」(CPM)です。
PERTは1950年代にアメリカ海軍特殊プロジェクト局のプロジェクトスケジュール計画手法として開発され、CPMはほぼ同時期にMorgan R. WalkerとJames E. KellyがDuPontのために開発したものです。 PERT と CPM の根本的な違いは 2 つだけです。
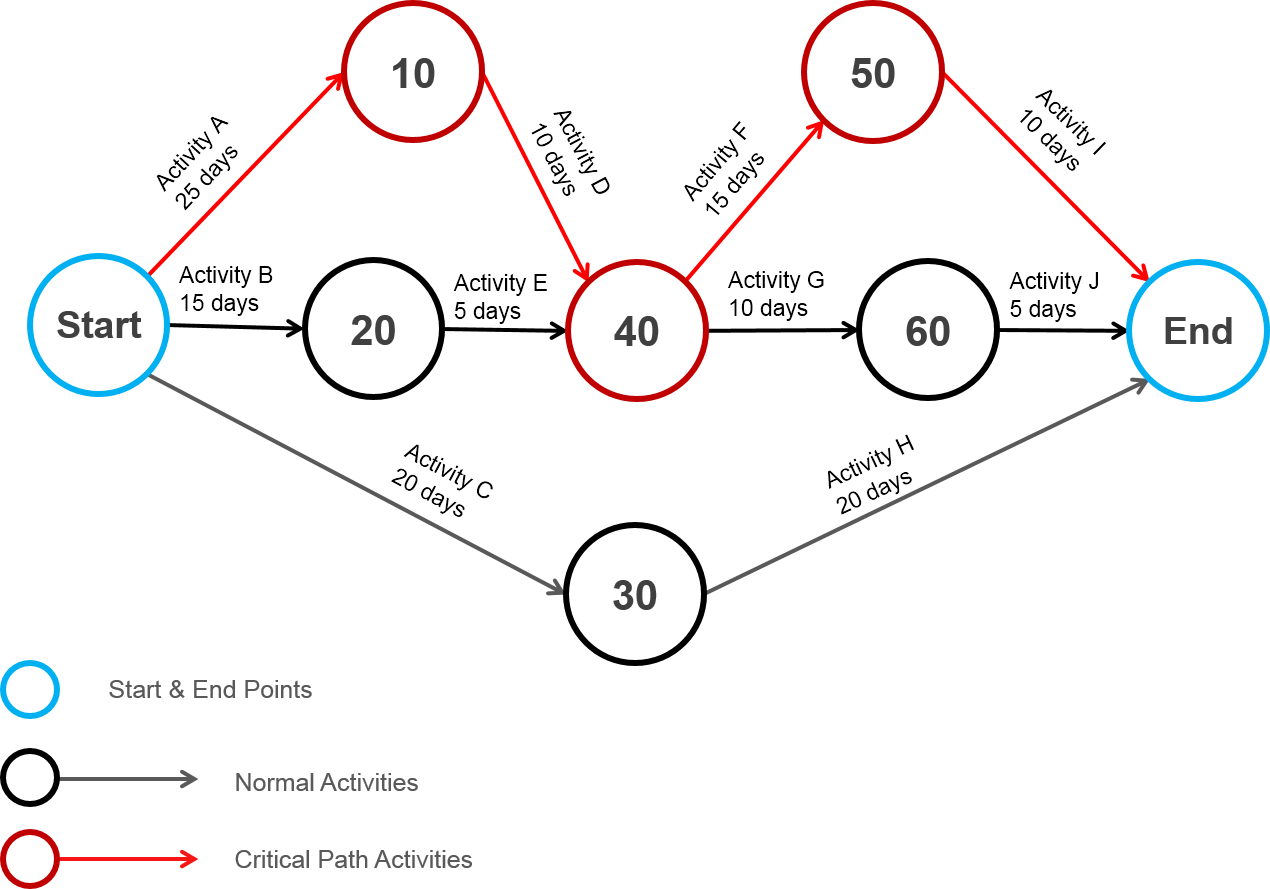
- PERT は「アクティビティ・オン・アロー」ネットワーク図を適用しますが、CPM は「アクティビティ・オン・ノード」ネットワーク図を適用します。 Activity-on-Arrowとは、ネットワーク図において、各マイルストーン・イベントをノードとして描き、各マイルストーン・イベントを結ぶ矢印にアクティビティ情報を表示することを意味します。 アクティビティ・オン・ノードとは、アクティビティ情報をノードとして描き、1つのマイルストーンから次のマイルストーンへリンクさせるのではなく、1つのアクティビティから次のアクティビティへリンクさせるものです。 この2つの図式モデルの違いを以下に示す。
- 2つ目の、より重要な違いは、従来のCPMでは各アクティビティに対して単一の期間およびコストの見積もりを適用するのに対し、従来のPERTでは各アクティビティに対して3ポイントの重み付け平均期間見積もり(楽観、最も可能性のある、悲観的な)を適用し、コストを考慮しない点である。 PERT加重平均期間は、次のように計算されます:
Te = (To + 4×Tm + Tp) ÷ 6 ここで、。
Te = 期待される期間
To = 楽観的期間
Tm = もっともらしい期間
Tp = 悲観的期間
最近では、CPMとPERTは主に、好ましいCPM「活動-ノード」図式モデルを適用し、PERT 3点加重平均期間の計算法を用いた単一の共通手法へと吸収されつつある。
PERT と CPM の両方は、次の 4 つの主要なスケジュール要素の分析に依存しています:
- プロジェクトを完了するために必要なすべてのアクティビティのリスト
- 各アクティビティの完了にかかる予想時間
- 各アクティビティ間の依存関係
- アクティビティの各セットに対する論理開始点と終了点
Critical Path Analysis:
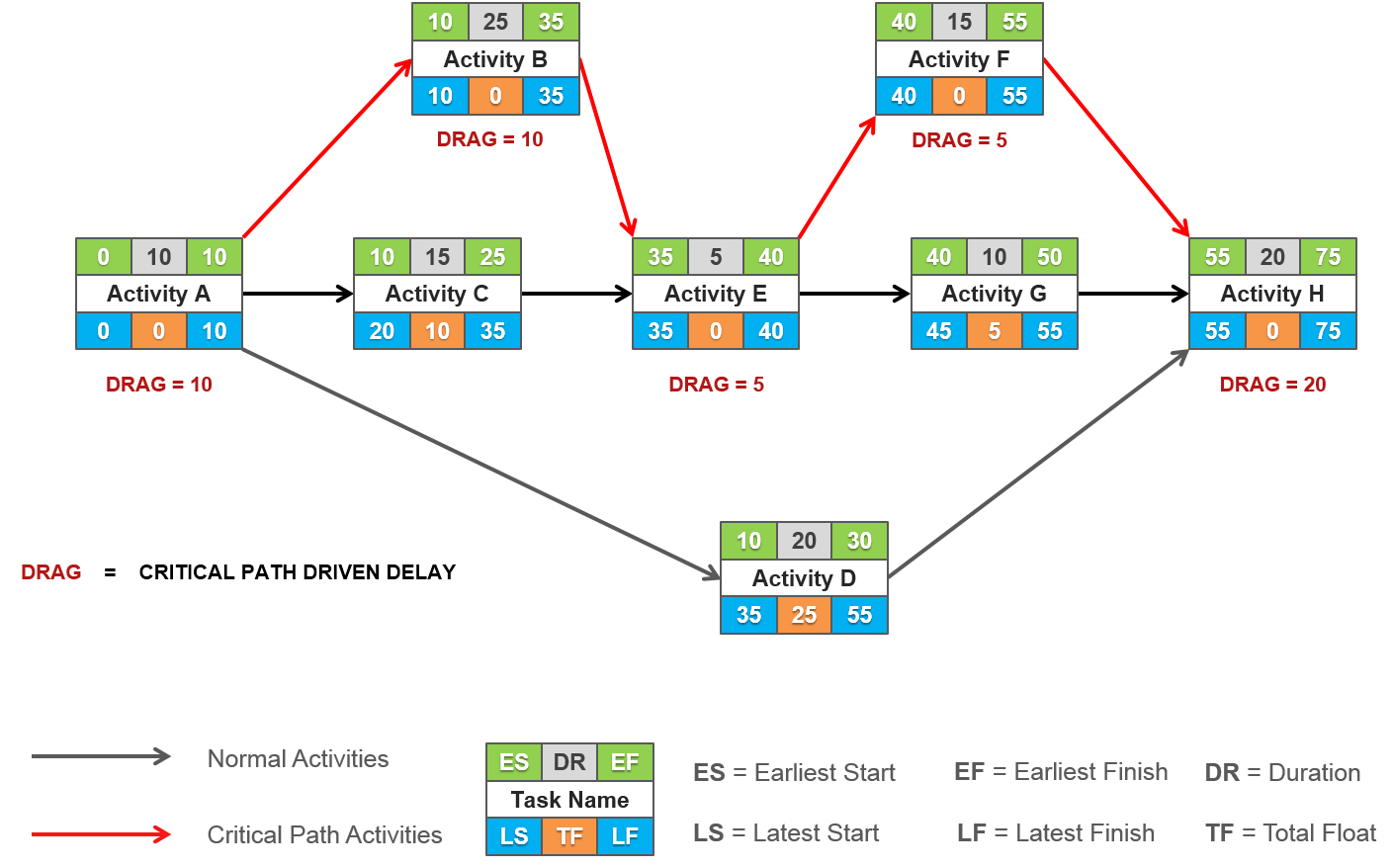
プロジェクトにおけるクリティカル パスは、論理的な終点を達成するために必要な、相互に依存する活動の最長経路のことです。 クリティカルパス分析では、各活動がプロジェクトを長くすることなく開始および終了できる最も早い時間および最も遅い時間を考慮する。 そうすることで、分析は、すべての重要な活動がプロジェクトの開始から終了までの最長経路上に存在するという意味で、どの活動がプロジェクトスケジュールにとって「重要」であるかを決定し、それによって最小の全体的なプロジェクト期間を定義する。 後続の活動に遅れを生じさせることなく遅延または延長できる活動は「フリーフロート」を持つと言われ、プロジェクト全体に遅れを生じさせることなく遅延または延長できる活動は「トータルフロート」を持つと言われる
あらゆる活動で利用できるトータルフロートの量は、2通りの方法で計算される。 いずれかの最新の開始日から最も早い開始日を減算することにより、または活動の最新の終了日から最も早い終了日を減算することにより、計算されます。
The amount of free float available to any activity is calculated by subtracting the earliest finish date of its nearest direct successor activity.より、その活動の最も早い開始日から最も早い終了日を引くことによって、任意の活動に利用可能なフリーフロートの量は、同じ結果をもたらすでしょう。 これは、アクティビティが後続のアクティビティの最早開始日に影響を与えることなく遅延させることができる時間の量です。 活動にゼロ総浮遊があるとき、それはまたゼロ自由浮遊を有する。
Critical Path Analysisはまたプロジェクトの「抗力」を計算するのに使用される。 言い換えれば、プロジェクトの期間が各クリティカルパスの活動によって延長される量である。 ドラッグは、クリティカルパスのアクティビティの期間と、他のすべての並行アクティビティの総フロート量のそれぞれを比較することによって計算されます。 クリティカルパスアクティビティに他の並行アクティビティがない場合、そのドラッグは、そのアクティビティの期間と同じになります。 クリティカルパスアクティビティに他のアクティビティが並行している場合、そのドラッグは、その期間、または総フロートの量が最も少ない並行アクティビティの総フロートのどちらか少ない方に等しい。
スケジュールリスク:
スケジュールは、リスクの影響を最も受けやすいプロジェクトドライバの1つである。 これは、スケジュールが複数の相互依存的な活動で構成され、それぞれが通常複数の不確実性を含んでいるからである。
たとえば、建物の建設に関わる非常に最初の活動の1つ、つまり現場の掘削と準備について考えてみよう。 これは比較的単純なプロセスですが、計画されたプロジェクトのスケジュールに沿って完了させるためには、多くの要因に依存します。
- Ensuring the required machines, materials, utilities and other resources are all available for use on the planned start date and remain so throughout the activity duration. ³³ ³ ³ ³³,000
- Ensuring the mechanical, tools and equipment can be cope with site conditions.
- 予期せぬ天候が進行に影響しないことを確認する。
- 予期せぬ労働問題が進行に影響しないことを確認する。
- 予期せぬ健康&安全問題が進行に影響しないことを確認する。
- 予期せぬ安全問題が進行に影響しないことを確認する。
- 予期せぬ規制の問題が進行に影響しないようにする。
ほとんどの建設会社はこの種のリスクの管理に精通しており、当たり前のように計画を立てるでしょう。 ポイントは、最も基本的なプロジェクト活動にさえ関連するリスク要因の数、および関連する不確実性を強調することにすぎない。 さらに、典型的なプロジェクトを完了するために必要なさまざまな活動の数とそれらの相互依存性を加えると、プロジェクトスケジュールにおける不確実性のレベルは指数関数的に増大する。 これはプロアクティブスケジューリングと呼ばれる。 しかし、純粋なプロアクティブスケジューリングは、現実的な選択肢ではありません。 ベースラインスケジュールに十分な安全性を持たせて、起こりうるすべての混乱を許容すると、間違いなくスケジュールが長くなってしまいます。 第2のアプローチは、リアクティブスケジューリングと呼ばれ、ベースラインスケジュールで吸収できない範囲のディスラプションに対応するための手順を定義することである
スケジュールリスクの中心はクリティカルパスであり、これはプロジェクトの最小期間を定義し、総フロート量が最も少ない、最も長い活動パスである。 トータルフロートがゼロであるクリティカルパス上のアクティビティに遅れが生じると、プロジェクト全体のスケジュールが遅れてしまう。 したがって、クリティカルパスをできるだけ保護することが重要であり、そのための最も効果的な方法は、各アクティビティの計画期間ができるだけ正確で堅牢であることを保証することです。
弊社のプロジェクトリスク管理サービスおよびソフトウェアに関する詳細、またはこの問題に関するご自身の見解については、弊社の「お問い合わせ」ページからお気軽にご連絡ください。