
Zwei der am häufigsten verwendeten Werkzeuge in der Projektterminplanung sind die „Project (or Program) Evaluation and Review Technique“ (PERT) und die „Critical Path Method“ (CPM).
Aber was sind die Unterschiede zwischen ihnen?
PERT wurde als Projektplanungsmethode in den 1950er Jahren für das U.S. Navy Special Projects Office entwickelt, während CPM etwa zur gleichen Zeit von Morgan R. Walker und James E. Kelly für DuPont entwickelt wurde. Beide Methoden werden verwendet, um die minimale Zeit zu ermitteln, die für die Fertigstellung eines Projekts benötigt wird, indem alle voneinander abhängigen Projektaktivitäten berücksichtigt werden, die den längsten Pfad oder die längste Dauer bilden.
Es gibt eigentlich nur zwei grundlegende Unterschiede zwischen PERT und CPM, und diese sind:
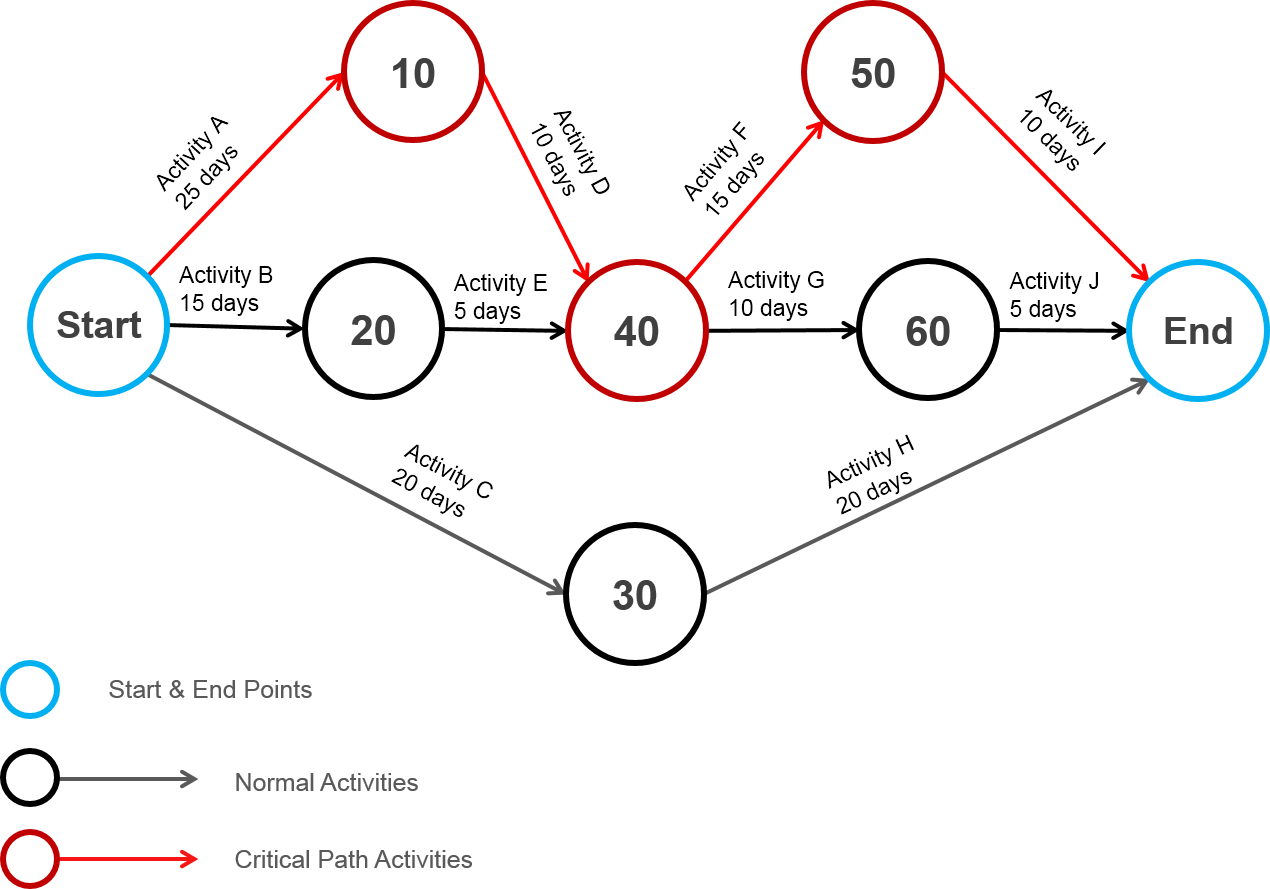
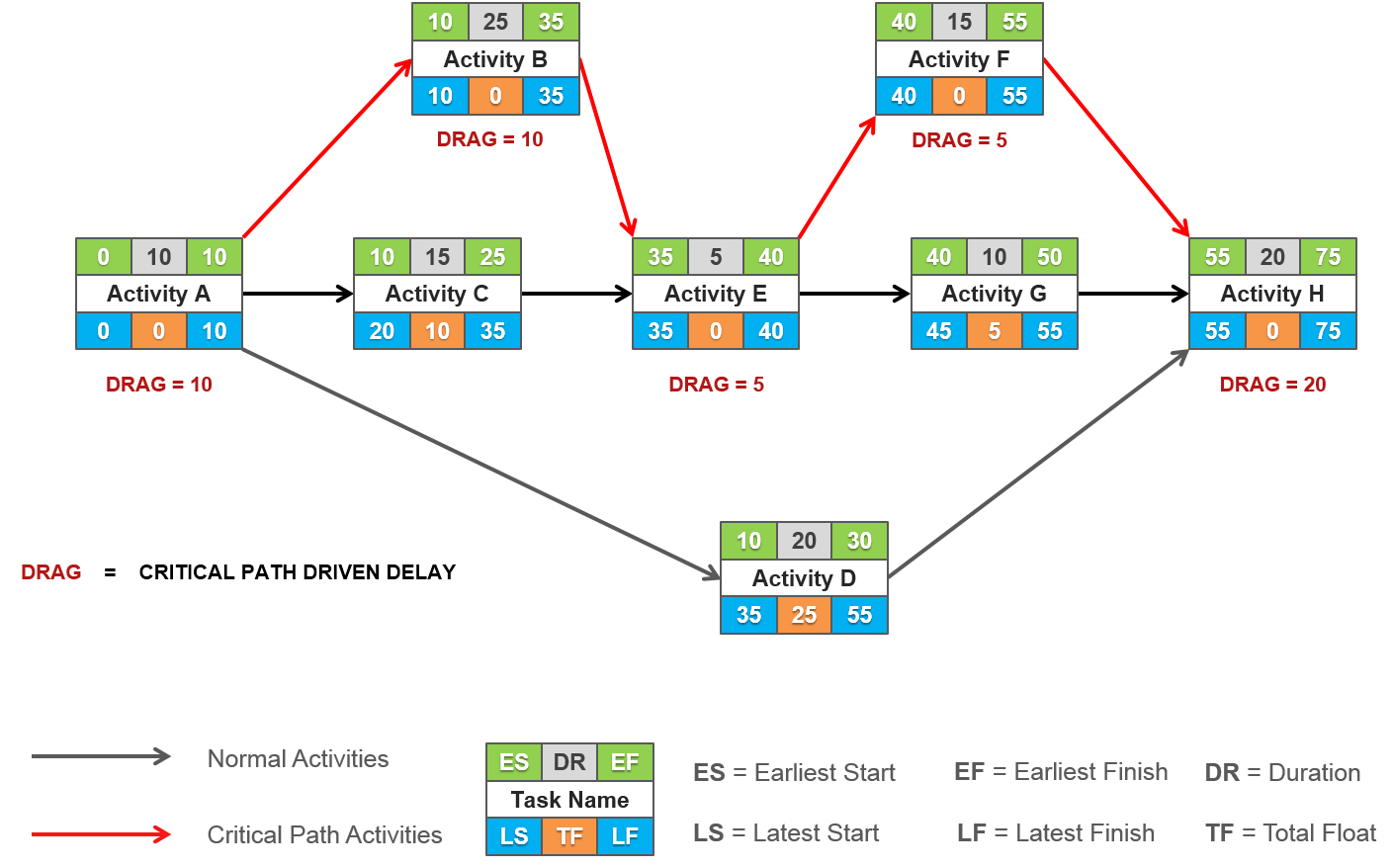
- PERT verwendet ein „Activity-on-Arrow“-Netzdiagramm, während CPM ein „Activity-on-Node“-Netzdiagramm verwendet. Aktivität am Pfeil bedeutet, dass das Netzdiagramm jedes Meilensteinereignis als Knoten darstellt und die Aktivitätsinformationen an den Pfeilen zeigt, die jedes Meilensteinereignis verbinden. Activity-on-Node zeigt die Vorgangsinformationen als Knoten und verbindet einen Vorgang mit dem nächsten, anstatt einen Meilenstein mit dem nächsten zu verbinden. Die Unterschiede zwischen den beiden schematischen Modellen sind im Folgenden dargestellt.
- Der zweite und wichtigere Unterschied besteht darin, dass das traditionelle CPM für jede Aktivität eine einzige Dauer- und Kostenschätzung anwendet, während das traditionelle PERT für jede Aktivität eine gewichtete Durchschnittsdauerschätzung mit drei Punkten (optimistisch, höchstwahrscheinlich und pessimistisch) anwendet und die Kosten nicht berücksichtigt. Die gewichtete durchschnittliche PERT-Dauer wird wie folgt berechnet:
Te = (To + 4×Tm + Tp) ÷ 6 wobei:
Te = Erwartete Dauer
To = Optimistische Dauer
Tm = Wahrscheinlichste Dauer
Tp = Pessimistische Dauer
Heute sind CPM und PERT weitgehend in einer einzigen gemeinsamen Technik aufgegangen, die das bevorzugte CPM-Diagrammmodell „Aktivität am Knoten“ anwendet und die PERT-Berechnung der gewichteten durchschnittlichen Dauer mit 3 Punkten verwendet.
Sowohl PERT als auch CPM stützen sich auf die Analyse von vier primären Zeitplankomponenten, nämlich:
- Eine Liste aller Aktivitäten, die zur Fertigstellung des Projekts erforderlich sind
- Die erwartete Zeit, die jede Aktivität zur Fertigstellung benötigt
- Die Abhängigkeiten zwischen den einzelnen Aktivitäten
- Logische Start- und Endpunkte für jeden Satz von Aktivitäten
Kritische Pfadanalyse:
Der kritische Pfad in einem Projekt ist der längste Pfad von voneinander abhängigen Aktivitäten, der erforderlich ist, um einen logischen Endpunkt zu erreichen. Die Analyse des kritischen Pfades berücksichtigt die frühesten und spätesten Zeiten, zu denen jede Aktivität beginnen und enden kann, ohne das Projekt zu verlängern. Dabei bestimmt die Analyse, welche Aktivitäten „kritisch“ für den Projektzeitplan sind, da sich alle kritischen Aktivitäten auf dem längsten Pfad vom Projektstart bis zum Projektende befinden und somit die minimale Gesamtdauer des Projekts definieren.
Aktivitäten, die über ihre geplante Dauer hinaus verzögert oder verlängert werden können, ohne die Gesamtdauer eines Projekts zu verlängern, werden als unkritische Aktivitäten betrachtet, die „Spielraum“ haben (auch als „Schlupf“ bekannt). Eine Aktivität, die verzögert oder verlängert werden kann, ohne dass es zu einer Verzögerung bei nachfolgenden Aktivitäten kommt, wird als „Free Float“ bezeichnet, und eine Aktivität, die verzögert oder verlängert werden kann, ohne dass es zu einer Verzögerung des Gesamtprojekts kommt, wird als „Total Float“ bezeichnet.
Die Höhe des Total Float, der für eine Aktivität zur Verfügung steht, wird auf eine von zwei Arten berechnet: Entweder durch Subtraktion des frühesten Starttermins vom spätesten Starttermin, oder durch Subtraktion des frühesten Endtermins vom spätesten Endtermin der Aktivität. Beide Methoden führen zum gleichen Ergebnis, nämlich der Zeitspanne, um die sich der Vorgang verzögern kann, ohne daß sich dies auf den spätesten Endtermin der nachfolgenden Vorgänge auswirkt.
Der für jeden Vorgang verfügbare freie Spielraum wird berechnet, indem der früheste Endtermin des Vorgangs vom frühesten Starttermin seines nächsten direkten Nachfolgers abgezogen wird. Dies ist die Zeitspanne, um die der Vorgang verschoben werden kann, ohne den frühesten Starttermin der nachfolgenden Vorgänge zu beeinflussen. Wenn ein Vorgang einen Gesamt-Float von Null hat, hat er auch einen Free Float von Null.
Die Analyse des kritischen Pfades wird auch verwendet, um den „Widerstand“ eines Projekts zu berechnen. Mit anderen Worten, der Betrag, um den sich die Dauer eines Projekts durch jede Aktivität des kritischen Pfads verlängert. Die Verzögerung wird berechnet, indem die Dauer der Aktivitäten auf dem kritischen Pfad mit der Gesamtpufferzeit aller anderen parallelen Aktivitäten verglichen wird. Wenn eine Aktivität des kritischen Pfades keine anderen parallelen Aktivitäten hat, ist ihre Verzögerung gleich ihrer Dauer. Wenn eine Aktivität des kritischen Pfades andere parallele Aktivitäten hat, ist ihre Verzögerung gleich dem kleineren Wert: ihrer Dauer oder dem Gesamtpuffer der parallelen Aktivität mit dem geringsten Gesamtpuffer.
Terminrisiken:
Ein Terminplan ist einer der risikoanfälligsten Projektfaktoren. Dies liegt daran, dass Zeitpläne mehrere voneinander abhängige Aktivitäten umfassen, von denen jede in der Regel mehrere Unwägbarkeiten enthält.
Betrachten Sie zum Beispiel eine der allerersten Aktivitäten beim Bau eines Gebäudes, nämlich die Ausgrabung und Vorbereitung des Geländes. Dies ist ein relativ unkomplizierter Vorgang, der jedoch von einer Reihe von Faktoren abhängt, damit er im Einklang mit dem geplanten Projektzeitplan abgeschlossen werden kann. Dazu gehören:
- Sicherstellen, dass die erforderlichen Maschinen, Materialien, Versorgungseinrichtungen und sonstigen Ressourcen zum geplanten Starttermin zur Verfügung stehen und während der gesamten Dauer der Tätigkeit einsatzbereit bleiben.
- Sicherstellen, dass die erforderlichen Maschinen, Materialien, Versorgungseinrichtungen und sonstigen Ressourcen während der gesamten Dauer der Tätigkeit einsatzbereit bleiben.
- Sicherstellen, dass alle Genehmigungen für die Baustelle vorliegen und während der gesamten Dauer der Tätigkeit gültig sind.
- Sicherstellen, dass die Maschinen, Werkzeuge und Geräte den Bedingungen vor Ort gewachsen sind.
- Sicherstellen, dass unerwartete Witterungsbedingungen den Fortschritt nicht beeinträchtigen.
- Sicherstellen, dass unerwartete arbeitsrechtliche Probleme den Fortschritt nicht beeinträchtigen.
- Sicherstellen, dass unerwartete gesundheitliche & Sicherheitsfragen den Fortschritt nicht beeinträchtigen.
- Sicherstellen, dass unerwartete Sicherheitsfragen den Fortschritt nicht beeinträchtigen.
- Sicherstellen, dass unerwartete behördliche Probleme den Baufortschritt nicht beeinträchtigen.
Die meisten Bauunternehmen sind mit dem Umgang mit diesen Arten von Risiken vertraut und planen sie als selbstverständlich ein. Es geht lediglich darum, die Anzahl der Risikofaktoren und die damit verbundenen Unwägbarkeiten zu verdeutlichen, die selbst mit den einfachsten Projektaktivitäten verbunden sind. Nimmt man noch die Anzahl der verschiedenen Aktivitäten hinzu, die für die Durchführung eines typischen Projekts erforderlich sind, sowie deren gegenseitige Abhängigkeiten, kann der Grad der Ungewissheit in einem Projektzeitplan exponentiell ansteigen.
Eine mögliche Lösung zur Maximierung der Robustheit des Zeitplans ist die Aufnahme eines Sicherheitspuffers in den Basiszeitplan, um alle erwarteten Störungen aufzufangen. Dies wird als proaktive Terminplanung bezeichnet. Eine rein proaktive Terminplanung ist jedoch keine realistische Option. Die Aufnahme eines ausreichenden Sicherheitspuffers in einen Basiszeitplan, der jede mögliche Störung berücksichtigt, würde zweifellos zu einem inakzeptabel langen Zeitplan führen. Ein zweiter Ansatz, der als reaktive Planung bezeichnet wird, besteht darin, ein Verfahren zu definieren, mit dem auf eine Reihe von Störungen reagiert werden kann, die vom Basiszeitplan nicht aufgefangen werden können.
Im Mittelpunkt des Zeitplanrisikos steht der kritische Pfad, da es sich dabei um den längsten Aktivitätspfad handelt, der die minimale Projektdauer definiert und den geringsten Gesamtpuffer enthält. Jede Verzögerung bei Vorgängen auf dem kritischen Pfad, die einen Gesamtpuffer von Null haben, verzögert den gesamten Projektzeitplan. Es ist daher von entscheidender Bedeutung, den kritischen Pfad so weit wie möglich zu schützen, und der effektivste Weg, dies zu tun, besteht darin, sicherzustellen, dass die geplante Dauer jeder Aktivität so genau und robust wie möglich ist.
Für weitere Informationen über unsere Dienstleistungen und Software für das Risikomanagement von Projekten oder wenn Sie einfach nur Ihre eigene Meinung zu diesem Thema äußern möchten, können Sie sich gerne über unsere Seite „Kontakt“ mit uns in Verbindung setzen.